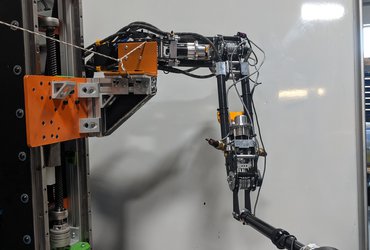
Développement d'un manipulateur robotisé collaboratif sécuritaire et performant basé sur des actionneurs magnétorhéologiques
Exonetik
Les manipulateurs robotisés collaboratifs et faciles à utiliser sont de plus en plus utilisés dans le secteur manufacturier pour réduire les tâches dangereuses ou répétitives que les humains doivent effectuer. Cependant, avant que les robots collaboratifs puissent effectuer efficacement des tâches près de l’humain, leur conception mécanique doit être ...
- Réalisés
- Sherbrooke