Combinaison d’un encodeur optique et d’un capteur externe pour estimer les longueur et la tension d’un câble
- Début: 30 août 2022
- Québec
- RBot9
DESCRIPTION
Description du projet :
(English follows)
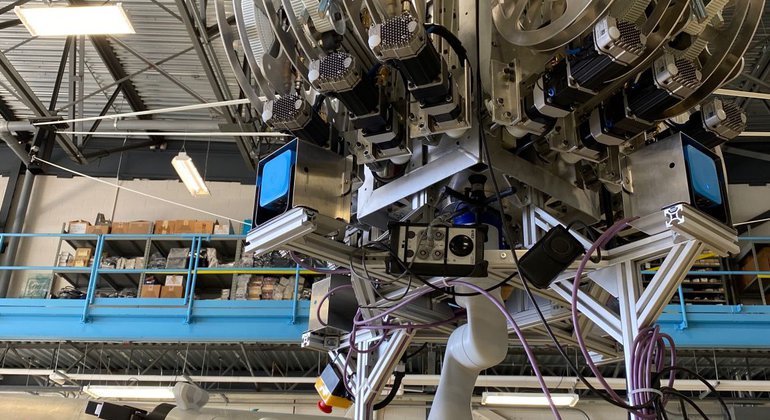
L’entreprise RBot9 a développé le RoCap, un robot parallèle entraîné par câbles (RPEC) qu’elle destine à des applications d’inspection, d’entretien et de fabrication d’aéronefs. Afin de faciliter la collaboration entre le RoCap et son opérateur, on voudrait améliorer deux aspects de ce robot : (1) on voudrait faciliter le redéploiement du robot en permettant son auto-étalonnage, c.-à-d., la détermination des positions de ses enrouleurs et (2) on voudrait permettre à l’opérateur de faire de l’enseignement direct (direct teaching), c’est-à-dire de programmer les déplacements de la plateforme mobile du robot en la guidant manuellement.
Pour atteindre ces deux objectifs, nous allons développer une nouvelle technique de mesure des tensions et dans un RPEC. Cette technique consiste à mesurer les déplacements d’une courroie crantée---qui fait office de câble---en deux endroits à l’aide d’encodeurs à haute résolution. La différence des déplacements étant égale à l’allongement d’un segment de courroie, on peut en déduire la tension qu’elle subit.
Les mesures de tensions ainsi obtenues seront combinées aux autres mesures sur l’enrouleur et à un modèle élastostatique du câble pour obtenir une méthode d’auto-étalonnage plus robuste à l’affaissement et à l’élasticité longitudinale du câble que celles qui sont actuellement disponibles. De plus, la nouvelle méthode d’estimation de la tension du câble permettra d’estimer l’intention de l’opérateur lorsqu’il guide le robot en appliquant des forces sur sa plateforme mobile et ce, sans utiliser de capteur force-moment entre la plateforme mobile et l’opérateur.
Équipe