Contrôle d’interaction pour un robot sériel collaboratif avec réducteurs à traction
- Début: 1 janvier 2022
- Sherbrooke
- Vectis Drive
DESCRIPTION
Contexte
La robotique de manipulation évolue et cherche, pour un nombre grandissant d’applications, à permettre
le contrôle des forces et des dynamiques d’interactions. Ce nouveau paradigme expose certaines limitations
des plateformes robotiques. Une partie importante de ces limitations est liée aux technologies
d’actionnement utilisées, où les réducteurs de vitesse (les engrenages) introduisent du jeu, de la flexibilité,
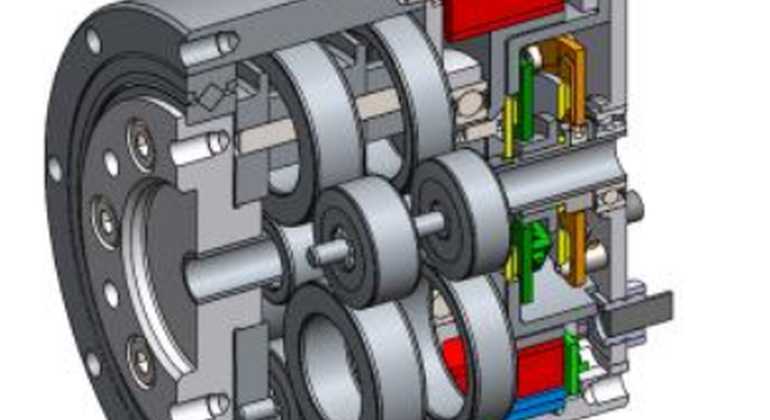
de la friction et des excitations vibratoires qui nuisent à la performance d’interaction. Vectis Drive est une
jeune compagnie qui travaille au développement d’une nouvelle technologie de réducteurs de vitesse basés
sur l’utilisation de contacts roulants lubrifiés. Les caractéristiques de cette transmission promettent une
amélioration significative des capacités d’interaction des systèmes robotiques. Ces capacités ouvriront
ensuite la porte à des applications robotiques variées tant en industrie (assemblage avec retour d’effort,
téléprésence, etc.) qu’à l’extérieur des milieux contrôlés (prothèses motorisées, réhabilitation, etc.) Vectis
Drive souhaite maintenant réaliser une preuve de concept en milieu opérationnel. Pour ce faire un bras
robotique sera conçu, assemblé et testé en environnement industriel simulé.
Le projet
Le projet proposé consiste à élaborer et tester l’ensemble des lois de commande pour un bras
robotique de type collaboratif bâti sur la technologie des réducteurs è traction en développement et
destiné à des tâches d’interaction en industrie. Les sous-volets proposés sont :
• Le contrôle actionneur, soit l’élaboration du contrôle en impédance et son optimisation;
• Le contrôle robot, soit la mise en place du contrôleur et son réglage en vue de tâches d’interaction.
Disciplines impliquées
• Commande de robot
• Asservissements
• Programmation
• Modélisation dynamique de systèmes mécaniques
• Mécatronique
Échéancier
Le projet devrait être amorcé en janvier 2022. Vectis drive doit livrer un système fonctionnel en janvier
2023. Les trois premières sessions consisteront à développer l’algorithme de contrôle du robot
expérimental en collaboration rapproché avec Vectis drive. Les sessions subséquences seront utilisées
pour compléter les requis académiques au besoin (cours, rédactions, etc.).
Environnement de travail
L’étudiant ou l’étudiante partagera son temps entre les locaux de Vectis Drive à Montréal (dans l’espace
de travail collaboratif de CollectivLab) et le centre de recherche du 3IT à l’Université de Sherbrooke.
Information de contact
| Vectis Drive Philippe Fauteux [email protected] 514 830-4511 |
Université de Sherbrooke Alexandre Girard [email protected] |