Robot collaboratif pour tâches de ponçage en cloisons sèches
- Début: 4 janvier 2022
- Sherbrooke
- RCM
DESCRIPTION
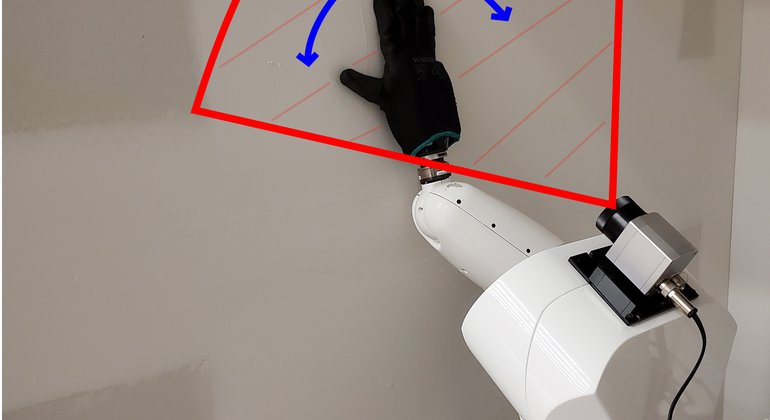
Dans le contexte de maison préfabriquée avec des murs en gypse, l'étape de poncer (sabler) l'excédent de plâtre utilisé pour recouvrir les trous de vis et les joints entre les feuilles (sur les murs, au plafond et dans les coins), est très laborieuse. L'objectif du projet est de détecter les zones à poncer dans un environnement réel (sur une chaîne d'assemblage de bâtiments préfabriqués) en vue d'automatiser la tâche à l'aide d'un robot mobile muni d'un bras collaboratif. Un deuxième étudiant travaillera sur le même projet pour implémenter le contrôle du robot effectuant la tâche en fonction des informations fournies par le bloc de perception.
Le projet est en partenariat avec RCM (https://www.rcmgroupe.com/) une entreprise qui fabrique des logements assemblés en usine. Le plan est d'explorer le choix des capteurs et d'établir une stratégie d'identification cet été. Par la suite, le plan est de réaliser une preuve de concept (d'une base mobile avec les capteurs nécessaires, un bras collaboratif et la programmation embarquée pour faire fonctionner le tout de façon harmonieuse) et de la mettre à l'épreuve dans l'usine lors d'un stage Mitacs prévu pour l'été 2022.
Équipe


