Asservissement d’un robot collaboratif pour tâches de ponçage
- Début: 1 janvier 2022
- Sherbrooke
- RCM
DESCRIPTION
Contexte
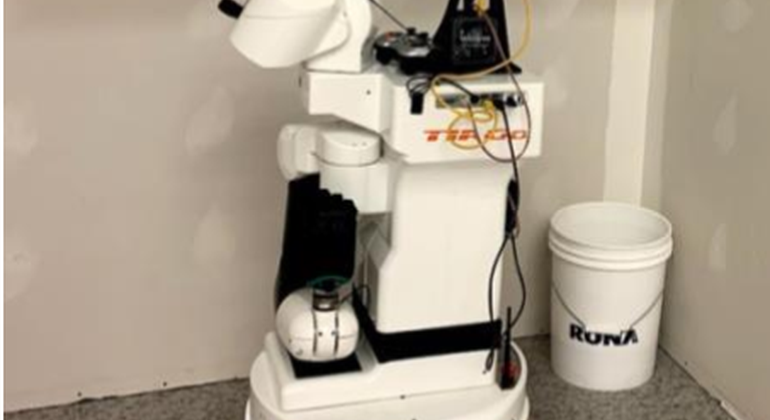
L’entreprise R.C.M. Modulaire inc. fabrique en usine des modules habitables pour le marché résidentiel,
commercial et industriel. Ces modules comportent des cloisons sèches auxquelles un enduit
(communément appelé plâtre) est appliqué pour masquer les fissures. Cet enduit est ensuite poncé pour
égaliser les surfaces. Or, cette étape est particulièrement coûteuse en temps, en plus de produire une
quantité importante de particules fines, ce qui peut être dérangeant à long terme pour le travailleur. On
propose donc de concevoir un robot capable de se charger de cette étape du ponçage suivant un minimum
d’indications de la part de son opérateur. Si des robots de ponçage existent déjà dans l’industrie
manufacturière, celui-ci aura la particularité d’être mobile en plus d’être en mesure de détecter
automatiquement les surfaces à traiter et de planifier sa tâche. Cette détection et planification seront contrevalidées par l’opérateur qui pourra effectuer des corrections grâce à une interface homme-machine ou par
déplacement du robot par contact physique. Le projet devra donc explorer l’état de l’art de la détection de
la composition des surfaces en étudiant différentes technologies de capteurs, intégrer un asservissement
en force permettant d’appliquer la pression nécessaire pour le ponçage, et être utilisable par un opérateur
non-expert.
Le projet
Le projet de recherche offert pour un(e) étudiant(e) à la maîtrise, est de développer les algorithmes pour
commander le déplacement du robot ainsi que la force appliquée par le robot pour le ponçage de sorte à
obtenir une qualité de fini acceptable. L’étudiant(e) travaillera avec une équipe existante qui s’occupera
des algorithmes de perceptions et de du prototypage mécanique.
Disciplines impliquées
• Commande de robot
• Asservissements
• Programmation
• Modélisation dynamique de systèmes mécaniques
• Mécatronique
Échéancier
Le projet devrait être amorcé en janvier 2022. Un stage Mitacs chez RCM est prévu pour l’été 2022 dans le
cadre de ce projet.
Environnement de travail
Le projet de recherche se déroulera principalement au centre de recherche du 3IT. L’étudiant(e) rejoindra
une équipe dynamique au sein du groupe Createk et du laboratoire IntroLab qui partagent un espace de
bureau ouvert au 3e étage du 3IT, et l'étudiant aura la chance d'interagir avec des experts en conception
de machines, en électronique et en informatique. Ils intégreront une communauté « maker » et pourront
parfaire leurs compétences en mécatronique et robotique.
Information de contact
| Université de Sherbrooke Alexandre Girard [email protected] |
Université de Sherbrooke François Ferland [email protected] |
