Contrôle en position d’un bras robotique portable
- Début: 1 juillet 2019
- Sherbrooke
- Exonetik
DESCRIPTION
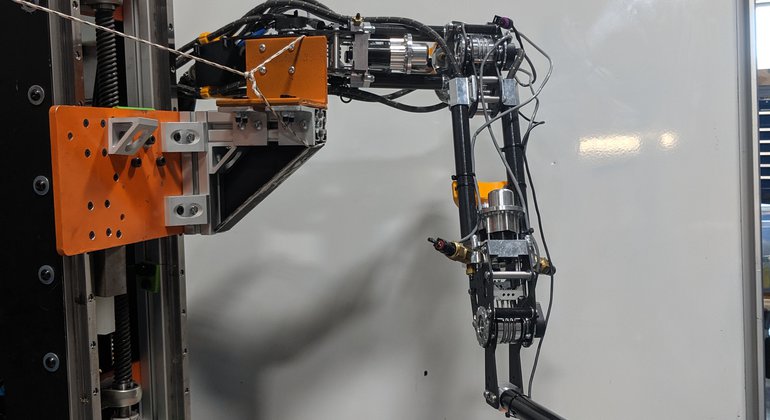
En contexte de rareté de main d’œuvre, il importe de trouver une solution à cette problématique. Les bras robotiques portables, soit un bras robotique installé sur une personne, sont une solution potentielle cette problématique. Ce bras pourrait travailler en tandem avec son utilisateur pour l’aider dans des tâches manufacturières. Cependant, le contrôle en position des bras robotiques portables est difficile à causes des perturbations causées par l’utilisateur.
Ainsi, ce projet de maitrise a pour but d’identifier la méthode la plus appropriée pour contrôler efficacement en position un bras robotique portable. En effet, un banc de test, simulant les perturbations humaines, sera utilisé pour valider l’efficacité de plusieurs techniques de contrôle, allant du contrôle par vision à la fusion de capteurs. L’identification de la meilleure technique permettra au bras robotique portable d’être plus performant. Cette technologie serait une solution potentielle au manque de main d’œuvre.
Équipe


