Développement d'un manipulateur robotisé collaboratif basé sur des actionneurs magnétorhéologiques
- Début: 1 janvier 2018
- Sherbrooke
- Exonetik
DESCRIPTION
La collaboration entre les robots et l’humain pour accomplir des tâches de fabrication est un événement majeur pour le secteur manufacturier, et pourrait étendre l’utilisation de manipulateurs robotisés à plusieurs industries. En effet, la polyvalence qu’offre la robotique collaborative en permettant aux robots et aux humains de travailler dans un même espace peut énormément contribuer là où la flexibilité est nécessaire dans les opérations de fabrication.
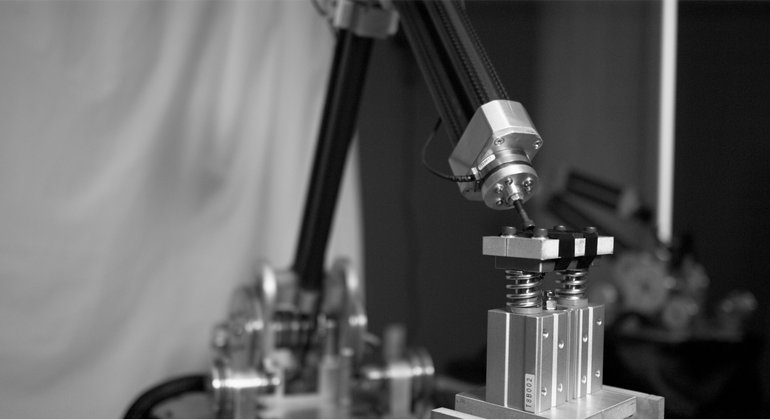
Cependant, avant que les robots collaboratifs puissent effectuer des tâches près de l’humain, leur conception mécanique doit être intrinsèquement sécuritaire et performante. L’objectif général du projet est donc de développer un manipulateur robotisé basé sur des actionneurs magnétorhéologiques. Cette technologie offre des avantages dynamiques très intéressants pour assurer une conception mécanique performante et intrinsèquement sécuritaire pour l’utilisateur qui interagit avec le robot.
Équipe