Interface haptique pour émulation une poignée de main
- Début: 1 mai 2018
- Québec
- Robotiq
DESCRIPTION
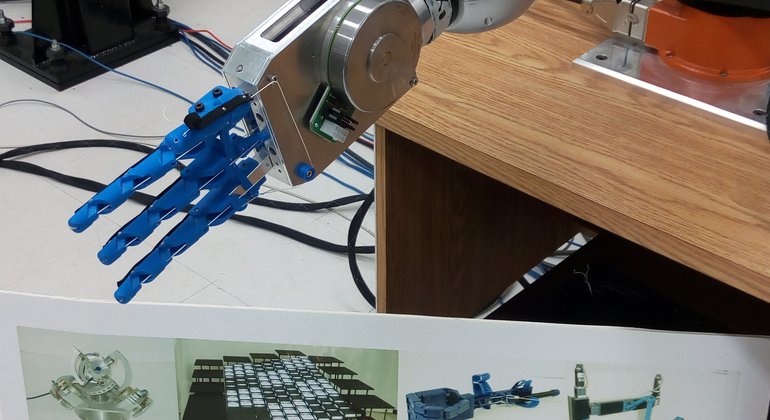
Les méthodes de télécommunications ont beaucoup évolué avec le temps. Du courrier aux appels vidéo en passant par le télégraphe et téléphone, ces différents moyens ont graduellement cherché à offrir une expérience plus près de celle face à face en stimulant différents sens. Parmi ces derniers, le sens du toucher n’est pas, ou très peu, solliciter. Une interface haptique est utilisée pour transmettre de l’information par le sens du toucher (e.g. un téléphone cellulaire qui vibre). Ce projet consiste donc à développer une telle interface pour reproduire une poignée de main. Cette dernière est composée d’une main et d’un bras robotique. Lors de son utilisation, son comportement tente d’émuler celui d’un être humain. Pour y parvenir, l’interface doit être en mesure de transmettre son intention, sa « personnalité », à l’utilisateur, mais également de s’harmoniser avec ce dernier.


