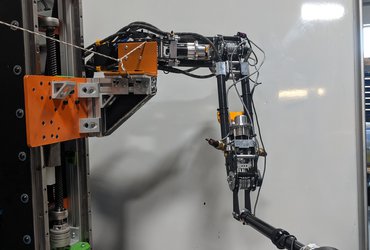
Development of a safe and performant collaborative robotic manipulator based on magnetorheological actuators
Exonetik
Collaborative, easy-to-use robotic manipulators are used in the industry to reduce risks or repetitive actions for operators. However, before collaborative robots can perform tasks close to humans, their design must be intrinsically safe and performant to operate without the need to slow their movements and limit their strength. Recent discoveries ...
- Done
- Sherbrooke