Medscint
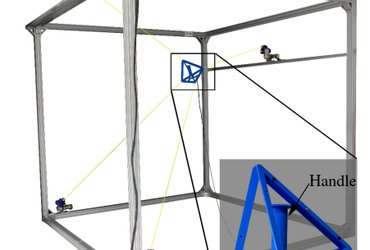
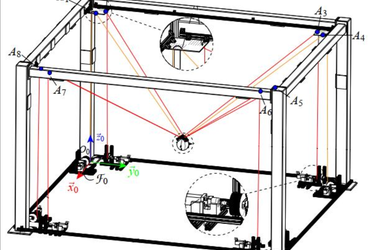
This project consists in building a cable-driven parallel robot capable of moving a dosimeter in a liquid (water tank) with a high accuracy for radiotherapy applications. A cable robot architecture is preferred in order to minimize the liquid perturbations caused by the robot motion. Moreover, this architecture allows the dosimeter ...