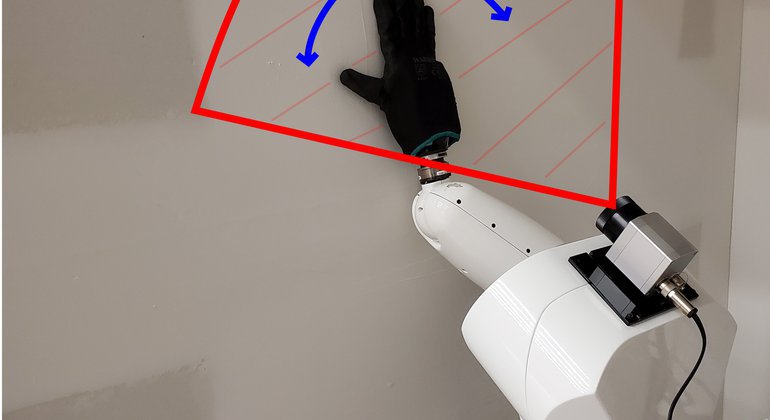
Collaborative robot tasked with sanding gypsum walls
- Start: Jan. 1, 2023
- Sherbrooke
- RCM
DESCRIPTION
Nowadays, many building contractors use modular construction, where various parts of a building are partially or completely built on an assembly line and then put together on the delivery site. Building interior modules often involve building and finishing plasterboard walls, including closing joints between panels and hiding fasteners or defects. To do so, a gypsum-based compound is applied, let to dry, and sanded iteratively to achieve a regular surface. This produces a considerable amount of fine dust, which can be a nuisance, especially in the closed space of a manufacturing plant. In this project, we are investigating how a robot manipulator arm, based on an automatically acquired model of the surfaces, can plan and execute the sanding task. Various force-based and position-based control schemes will be evaluated and prototype will be demonstrated on a real production line.
Team