Position control of a wearable robotic arm
- Start: July 1, 2019
- Sherbrooke
- Exonetik
DESCRIPTION
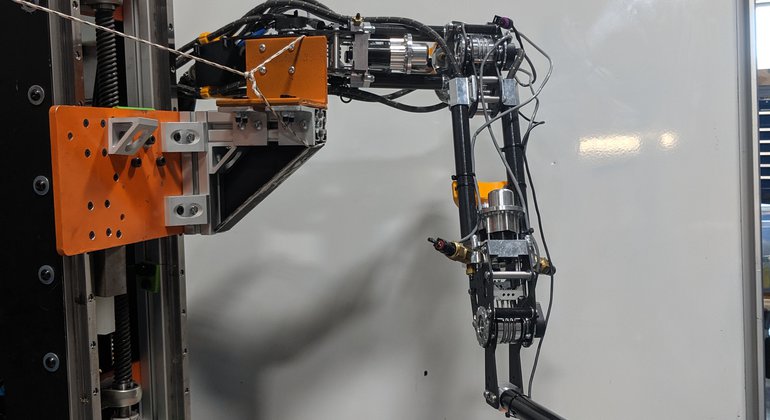
Wearable robotics arms, a robotic arm that is directly installed on a person, are a potential solution to a modern problem, the lack of workforce. Wearable robots could be used to work along with users to help them in a multitudes of industrials tasks. However, position control of wearable robot is difficult because of the human motion complexity.
Thus, this master projet investigate the most appropriate algorithm to efficiently control a wearable robot position. Indeed, a test bench, used to simulation human perturbations, will be used to compare a multitudes of control algorithms. Those include visual servoing and sensors fusion. To be able to find the best way to control a wearable robot in position will enable multiples application, therefore making wearable robot an interesting solution to the lack of workforce.
Team


